
 A Gesture Controlled robot is a kind of robot which can be controlled by your hand gestures not by old buttons.You just need to wear a small transmitting device in your hand which included an acceleration meter.This will transmit an appropriate command to the robot so that it can do whatever we want. The transmitting device included a comparator IC for analog to digital conversion and an encoder IC(HT12E) which is use to encode the four bit data and then it will transmit by an RF Transmitter module.
A Gesture Controlled robot is a kind of robot which can be controlled by your hand gestures not by old buttons.You just need to wear a small transmitting device in your hand which included an acceleration meter.This will transmit an appropriate command to the robot so that it can do whatever we want. The transmitting device included a comparator IC for analog to digital conversion and an encoder IC(HT12E) which is use to encode the four bit data and then it will transmit by an RF Transmitter module.
At the receiving end an RF Receiver module receive's the encoded data and decode it by an decoder IC(HT12D). This data is then processed by a microcontroller (P89V51RD2) and finally our motor driver to control the motor's.
 |
| Robot |
 |
| Gesture device |
Now its time to break the task in different module's to make the task easy and simple any project become easy or error free if it is done in different modules. As our project is already devided into two different part transmitter and receiver. We will discuss both of them one by one. Apart from Power Supply as it was discussed in last blog you can see that by just click here
1> Transmitter device or Gesture device: This part contain four module in it--
1- Accelerometer
2- Comparator
3- Encoder(HT12E)
4- RF Transmitter
Accelerometer:- An Accelerometer is a kind of sensor which gives an analog data while moving in X,Y,Z direction or may be X,Y direction only depend's on the type of the sensor.Here is a small image of an Accelerometer shown. We can see in the image that their are some arrow showing if we tilt these sensor's in that direction then the data at that corresponding pin will change in the analog form.
The Accelerometer having 6 pin-
1- VDD- We will give the +5volt to this pin

2- GND- We simply connect this pin to the ground for biasing.
3- X- On this pin we will receive the analog data for x direction movement.
4- Y- On this pin we will receive the analog data for y direction movement.
5- Z- On this pin we will receive the analog data for z direction movement.
6- ST- this pin is use to set the sensitivity of the accelerometer 1.5g/2g/3g/4g.
Comparator:- For the purpose to change the analog voltage into digital we use comparator which compare that analog voltage to a reference voltage and give a particular high or low voltage.
 |
| LM324 IC |
The figure shown here is comparator IC. The pin 1,7,8 and 14 are use to give out put to the microcontroller.We should connect a reference voltage to the -ve terminal for high output when input is high(+ve terminal for high output when input is low) from the LM324 IC.
In this circuit we compare the data from x with two terminal one for positive x direction and negative x direction and same for y direction.
 |
| HT12E encoder |
- pin (1 to 8) A0-A7 known as address bits so we do not need to consider them.
- pin no (9 and 18) are use to bias the IC as pin-18 as VCC and pin-9 as GND.
- pin - 17 is connected to the rf transmitter module Din.
- pin-16 and pin-15 are connected by an Osc resistor known as Roscc(1.1 Mohm)
- pin-14 is connected to ground to enable the transmitt.
- pin-13 to pin-10 are known as AD0 to AD3 those having the 4bit data which is required to transmit.
RF Transmitter Module(TX):- The transmitter module is working on the frequency of 433MHz and is easily available in the market at the cost of 250rs .
- The vcc pin is connected to the +terminal in the circuit.
- The data pin is connected to the HT12E(pin no-17) that is transmitted or we can say that encoded data.
- The next pin is shown in figure is GND that is connected to the ground terminal.
- Now the last pin ANT this is connected to a small wire as an antenna.
  |
| CIRCUIT OF GESTURE DEVICE (TRANSMITTING MODULE) |
1> Receiver or Robot: This part contain four module--
- Receiver
- Decoder(HT12D)
- Process(microcontroller 8051)
- Actuator (Motor driver L293D)
RF Receiver Module(RX):- The RF receiver module will receive the data which is transfered by the gesture device. It is also working as similar to the transmitter module-
- Connect the +vcc pin to the 5volt terminal
- Connect the ground pin to the ground terminal
- The data pin is then connected to the HT12D (pin-14)
- So that we can get the decoded 4 bit data

Decoder (HT12D):- In a very simple way we can say that an HT12D converts that serial data into parallel which is received by the rf receiver module.The input data is decoded when no error or unmatched codes are found. A valid transmission in indicated by a high signal at VT pin that is pin no 17.
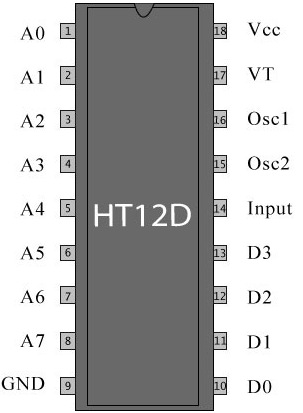 |
| HT12D |
- pin 18 : It is use to give the +vcc or biasing to the IC HT12D this pin is connected with the +5 volt
- Pin 17 : It is the valid transmission pin it will high when the transmission is ok so that we connected this pin to an led for indication.
- Pin 16-15: we connect these two pin directly by a 51k resistor
- Pin 14 : This pin is connected with the rf receiver module data pin to receiving the serial data.
- Pin 10-13: These pins are data pin which is transferred by the gesture module
The basic circuit to initialize the microcontroller is shown below. We just need an reset circuit and oscillator to run the program.
 |
| 8051 micro controller circuit |
we use the port 1 as an input port and port 2 as an output port.
so the Data from the decoder will connect with pin 1,2,3,4 and motor should be connect with pin 21,22,23,24.

For forward the data to the Port2 is 0a or for backward it is 05 then for lest its 02 and for right it is 08.
ACTUATOR'S(L293D): The Actuator's are those devices which actually gives the movement or to do a task like motor's. In the real world their are various types of motor's available which works on different voltages. So we need motor driver for running them through the controller. To get interface between motor and microcontroller . We use L293D motor driver IC in our circuit.
ACTUATOR'S(L293D): The Actuator's are those devices which actually gives the movement or to do a task like motor's. In the real world their are various types of motor's available which works on different voltages. So we need motor driver for running them through the controller. To get interface between motor and microcontroller . We use L293D motor driver IC in our circuit.
 |
| motor driver circuit |
As in above circuit 2 pin male
As in above circuit a 2 pin male connector in connected to the pin 8 this will provide the operating voltage for the motor like if we want to run our voltage on 12volt. so we just have to connect a 12volt power source
As in above circuit a 2 pin male connector in connected to the pin 8 this will provide the operating voltage for the motor like if we want to run our voltage on 12volt. so we just have to connect a 12volt power source
Now here is the full circuit diagram of the robot (receiver module)
 |
| RECEIVER MODULE |
 |
| ACTUAL CIRCUIT OF RECEIVING MODULE |
/**********************************************************************************
Gesture Controlled robot C program using 8051 microcontroller
***********************************************************************************
INPUT DATA to PORT 1 LM324 OUTPUT DATA to PORT 2 for L293D
MSB LSB MSB LSB
1111 0001(0xf1) 0000 1010(0x0a) forward
1111 0010(0xf2) 0000 0010(0x02) right
1111 0100(0xf4) 0000 1000(0x08) left
1111 1000(0xf8) 0000 0101(0x05) backward
**********************************************************************************/
#include<reg51.h> //INCLUDE reg51.h for 8951
void main()
{
P1=0xff; // set port as input port
P2=0x00; // set port as output port
while(1) // infinite loop
{
if(P1==0xf1)
{
P2=0x0a;
}
else if(P1==0xf2)
{
P2=0x02;
}
else if(P1==0xf4)
{
P2=0x08;
}
else if(P1==0xf8)
{
P2=0x05;
}
else
{
P2=0x00;
}
}
}
Here is the video presentation of the gesture robot....
Here are some more pics of the robot . Leta take a look.






***************************** thanx and best of luck*****************************

Which 3 IC used in transmitter?? on your hand?
ReplyDelete1.lm324
2.encoder
which is 3rd IC?
beta abcd padho pehle
Deletedecoder ht12d
Deleteno third ic is used ....actually i made this circuit for other project and i used tht hardware for gesture the ciruit diagram is correct and no third ic is there....
ReplyDeleteI have used arduino uno in robot and a clone of it in glove so please can u help me with the code.
Deletecan i use 89c51 or 89s51/52?????
Deleteexactly, same doubt.
Deletebut i guess 89s52 is of 8051 family so can be used.
what are the specifications of motors u hav used n also plz suggest a suitable program for this?
ReplyDeletesir can you give the program for this project please
ReplyDeleteThis comment has been removed by the author.
ReplyDeletesorry its pin no 3,6,9,11
ReplyDelete10k variable resistor
Deletesir,what is the range of variable resistance that we have to use while transmitting
ReplyDeleteHello sir,
ReplyDeletei want to make this robo as my final year project..
i need your help with the same..
plz give me the 8051 coding if possible..
my email: akkii.som@gmail.com
thnx in advance..
Hiiii....Bro i liked ur project..and i'm also working on a similar project using accelerometer...so can u plzz...provide me the code for this project..
ReplyDeletemy id: bawadavinder@yahoo.com
Thanks...:)
Did u get the code for the project??
DeleteAnd is it working.
If yes, please kindly forward the code to this email id bushrakn_96@yahoo.com
Your projects sounds fun.i also want to work on this project.please email me the coding for the microprocessor.
ReplyDeletemy email:doomed.007@gmail.com
Thnx in advance :)
This comment has been removed by the author.
ReplyDeleteplease mail me coding for the microprocessor. my email id is: priyamsharma4490@gmail.com
ReplyDeletehey could you mail me the microprocessor coding to thowseaf786@hotmail.com
ReplyDeleteHello bro,
ReplyDeletei m making this robo to my final year project for diploma...plz help me...
i need your help with the same..
plz give me the 8051 coding.....
my email: rahul.tike@yahoo.com
thnx in advance
sir i want to make this for my final year project so please give me for this coding and hex file
ReplyDeletesir please send me the code,,,,,,
ReplyDeletemy id: varaprasad239@gmail.com
updates on blogs
Deletebuddy its already there just read it.
Deletesir can you send me the code please
ReplyDeletemail id:manikantha.g460@gmail.com
sir,what is the range of 10k variable resistor while transmitting plzzzzzzzz help me n my mail id is rveladri@gmail.com
ReplyDeletecan u plz mail me the code?? thank you..!!
ReplyDeletemy id is: jinx.rodes@gmail.com
updates on blogs
Deletecan u plzzzzzzzz mail me the programming at tejas.salunkhe@gmail.com
ReplyDeletewat else can be added in this project or any variations??? pls mail me on wprachiti@gmail.com
ReplyDeletewat else can be added in this project or any variations??? n extension pls mail me on rveladri@gmail.com
ReplyDeleteproject sounds nice please send me code and diagram and tell me how to burn the code into ics.how a programmer for this can be made if i am using 89c2051or 8051or which supprot both the ics ,do tell me if u have any schematics please frward it to.e mailid-abhishekpdh27@gmail.com
ReplyDeletewhich project dude
Deletecan u plz mail me all stuf for this project plz its urgent..
ReplyDeletemail me at akshayahuja17@gmail.com
friend first tell me what exactly u want then surely i will help you
Deletebhai i actually need clear circuit diagrma for reciever module
Deletesend me code for Micro controller (AT89C51) and its hex file. also PCB simulation circuit
Deletei am actually trying to do a similar project...so i would really appreciate if you could send me the related stuff like circuit diagrams and the source code.........plz send it to josephg247@gmail.com
ReplyDeletecircuit diagram is in the blog and also thecode
Deleteawesome dude
DeleteThis comment has been removed by the author.
ReplyDeletesir i want 2 ask how correct comparator ic LM324 is converting analog signal from accelerometer into digital? Is this conversion reliable? what is the range of smallest movement of hand in any direction (example forward) so that LM324 can give precise digital output ?
ReplyDeletesir plz send the full docment of this project to my mail sagar.728@gmail.com
ReplyDeletesir plzz mail me the code of this project my email id is omkar.nightmare@gmail.com
ReplyDeletelet me Point out one thing, you are using ADXL335 accelerometer, ryt? Maximum Vss of it is 3.6V but you are giving 5v to it which will burn it.
ReplyDeletecan u plz mail me all stuf for this project plz its urgent..
ReplyDeletemail me at Ayomideodegbesan@yahoo.com
hello,i am workimg on the same project so could you please help me by mailing me the coding at suyashsmailbox@gmail.com
ReplyDeletethanks
Can i use ATMEGA32 MCU
ReplyDeletehello ,i'm a hobbyist and i am interested in this project.this has also come on the electronics for you magazine .CAN u PLEASE send me the pcb layout and can you post a printed schematic on the blog
ReplyDeleteplease can anyone mail me the code for the above project . i am really struck with the programming part of this . Please help me out with the programming its really urgent for me..
ReplyDeletei have used ATmega 16 microcontroller.
please mail me the code asap if anyone has it at- rahul.sirohi.10@gmail.com
Please can anyone mail me the code of this project.I need to see the coding as I am working on this project for my final year my email address is montighosh007@yahoo.in
ReplyDeleteabe abcd padh pehle
Deletesalle ko paki pakie chhahiye
Sir can u plz send me full layouts and code. . My email id is velhalomkar@gmail.com
ReplyDeletehi.. i want to make this robot as my finale year project can you please send the full detail of this gesture control robot.....thank you.... at vaghela.jagrut@yahoo.com
ReplyDeletesir,
ReplyDeletei want to do this project.Can you please send me the code.
(shobana5.sr@gmail.com).
from this kits are brought can u plz tell me
ReplyDeleteits urgent ...
wat is the use of this robot...????
ReplyDeletecan u tell me how u adjusted the preset given to the comparator ..is it just by trial and error method
ReplyDeleteplease tell me from where i can buy an accelerator ic please ..... at vaghela.jagrut@yahoo.com
ReplyDeletesir
ReplyDeletei want to do this project.Can you please send me the code.
here is my email id :saiprasad.veer@gmail.com
please send immediately its urgent......plz sir
sir,
ReplyDeletecan u tell me how to use the output of z axis in accelerometer.
in the above diagram of transmitter, only x and y outputs are used.
in left and right movement , there will be change in all three axis????
pls send me the required solution on my email: ronak2601@gmail.com
Z axis is for up and down movement. You cannot move your car in up and down direction.
Deletebut there will be changes in co-ordinates if we r using 3 axis .
Deletehey,can you please send more details about this system
ReplyDeletesir could u plz send me the full programming code for this project....my mail id is krsanju98s@gmail.com
ReplyDeletethe range of variable resistors in this project is 1.6V try it will work
ReplyDeleteSir i want to make this project for my final year...please provide me all the details on my mail id is
ReplyDeletemr.abhi.chauhan@gmail.com..
i will be highly thankful to you
Abhi Chauhan
sir please provide the clear schematics of the circuit,,hot to set the preset...which antenna is to be used..please sir
ReplyDeletemr.abhi.chauhan@gmail.com
Abhi Chauhan
sir need the full detail about accelerometer based gseture recognition.
ReplyDeletesir ,how to simulate this project ..and if imlate then in which softwere...plz tell me sir
ReplyDeleteSir i am almost done with this project and i have verified and checked each block of it which is working fine. The only problem i am facing right now is with the microcontroller. I have burnt the program which you have mentioned on the blog. But when the uC gets the input at port1 it does not give the desired ouput at port2. Infact all the pins at port2 give a zero voltage output even after the variations of the accelerometer. I am not able to figure out right now what can be the problem with this. Can you please help me with this as i need to submit my project in next week itself.
ReplyDeleteThank you very much sir.
what was the refernce voltage given to the comparator
DeleteThe reference voltage should be 1.60V
Deletesir I can't get desire output of camparator.......
ReplyDeletewhat is the exact out put of decoder at the recever
Sir i am almost done with this project and i have verified and checked each block of it which is working fine. The only problem i am facing right now is with the microcontroller. I have burnt the program which you have mentioned on the blog.bt prlm is decoder ic not getting power supply ,,,,sir pls help me
ReplyDeleteHey guys any one want the another program. i will upload the program for this project (alp and
ReplyDeleteembedded c ).....
Amore413@gmail.com
It will be really helpful if u could upload it here or can u mail it to me at anudeep759@gmail.com please...
DeleteThanks in advance!!
Helo sir, i'm also working on a similar project using accelerometer...so can u please...provide me the code for this project. I am using atmel at89s52 Microcontroller. It is also a 8051 mc.. Hope u'll ASAP..
ReplyDeletemy email id: frijoc@gmail.com Thanks...:)
i am using pic 16f887 so can i use ADC intead of encoder decoder
ReplyDeleteSir, it is a great idea but i m having a problem. How can we program the 8051mc. PLZ rply as soon as possible.
ReplyDeletemy email id:ahujaaniket007@gmail.com
according to the circuit the signals are high for encoder ic..............but the data sheet says data pins are active low.........?????
ReplyDeleteYes it will do...
ReplyDeletesir i need the full detail about accelerometer based gseture recognition.
ReplyDeletehbaloch3@gmail.com
Sir i am in urgent need of the detailed information about the project...
ReplyDeleteCan u mail me the deatils on vishal.life92@gmail.com?
can u please send us the code and details of the project
ReplyDeletedarpan338@gmail.com
thank you
good information provide your blog Big Data for telecom
ReplyDeletesir can u tell me the particular application and advantages of gesture controlled robot in detail view........
ReplyDeleteits very important please reply as early as possible.......
Deleteits very important please reply as early as possible.......
Deletecan anyone please explain me the programme of this project??? please its very urgent....
ReplyDeletesir can you please send me the program code for this project? the one u published in this page i have burn in microcontroller (AT89S52) but is not working. so please help me and plese explain my email id is syedfaizan32@gmail.com
ReplyDeletethank you
It was a clear post, thanks for sharing this awesome post, if anyone wish to do a project in salesforce crm domain get into
ReplyDeleteSalesforce training in Chennai
I am reading your post from the beginning, it was so interesting to read & I feel thanks to you for posting such a good blog, keep updates regularly.
ReplyDeleteRegards,
Web design training Chennai
mail me the mc program asap..please @krazytokool@gmail.com
ReplyDeletehello friend the program is already in the blog...after the circuit.
DeleteI want the PCB layout of transmitter and receiver.
ReplyDeletecan i simulate this project in proteus /multisim ?
ReplyDeleteThanks of sharing this post…Python is the fastest growing language that helps to get your dream job in a best way, so if you wants to become a expertise in python get some training on that language.
ReplyDeleteRegards,
Python Course in Chennai
what is the max. distance between transmitter and receiver?
ReplyDeletecan i use 89c51 instead of p59v51rd2?
ReplyDelete
ReplyDeleteI found your blog quite interesting and the concern in the blog is really impressive. Thanks for sharing.
avr microcontroller trainnig in chandigarh
can we use 89s51 or s52??????????????????????
ReplyDeleteyes you can :-)
Deleteplease mail me coding for the microprocessor. my email id is: sandhya201994@gmail.com
ReplyDeletethank u!
Paris airport transfer - Parisairportransfer is very common in Paris that provides facilities to both the businessmen and the tourists. We provide airport transfers from London to any airport in London and also cruise transfer services at very affordable price to our valuable clients.
ReplyDeleteParis taxi
Paris airport shuttle
paris hotel transfer
paris airport transfer
paris shuttle
paris car service
paris airport service
disneyland paris transfer
paris airport transportation
beauvais airport transfer
taxi beauvais airport
taxi cdg airport
taxi orly airport
Thanks for your valuable post.
ReplyDeletemsbi training in chennai
Interesting and useful article.
ReplyDeletehadoop training in chennai
• Its really helpful for me. Suppose if anyone want to find real time coaching center.recently i did some blog may visit..
ReplyDeleteoracle training in chennai
• Looking for real-time training institute.
ReplyDeletedot net training in chennai
• specially thanks for sharing these site.
ReplyDeletewebsphere training in chennai
Thanks for giving important information to training seekers,Keep posting useful information..
ReplyDeleteEmbedded system training in chennai
Embedded system course training in chennai
Embedded system training institute in chennai chennai
can i use at89c51 0r 52 istead of ur ic
ReplyDeleteReally gorgeous post. Your blog article really helps to him.It's valuable informative.Keep it up I'll salute your hard work!Want to learn for Hadoop course to reach us , Hadoop Training in Chennai
ReplyDeleteHadoop Training Institute in Chennai
Thanks for sharing such an interesting post with us. You have made some valuable points which are very useful for all readers
ReplyDeleteIOS Apps training in mohali
I wondered upon your blog and wanted to say that I have really enjoyed reading your blog posts. Any way I’ll be subscribing to your feed and I hope you post again soon.
ReplyDeleteTexting API
Text message marketing
Digital Mobile Marketing
Sms API
Sms marketing
Excellent Article
ReplyDeleteLeading Local Search Engine in India
you can Find AC Mechanic in Chennai
you can Find Automobile Batteries Chennai
you can Find Beauty and Spa Chennai
you can Find Best Bike Mechanics Chennai
you can Find Leading Call Taxi Chennai
you can Find 24 Hours Pharmacy Chennai
You can find All your requirements in call360 for more details & search Visit CALL360
Thank you for useful inoformation!
ReplyDeleteIot Training in Chennai
Big data Hadoop Training in chennai
Great work.. Thank you... lucky patcher custom patches
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteSir. Plz give me the documents related to gesture control robot... It will be a great help..my Id
ReplyDeletersaryanttf@gmail.com
I believe there are many more pleasurable opportunities ahead for individuals that looked at your site. Best Java Training Institute in chennai
ReplyDeleteThank you a lot for providing individuals with a very spectacular possibility to read critical reviews from this site.Great blog.
ReplyDeleteselenium training in bangalore
Great article. I feel really happy to have seen your webpage and look forward to so many more entertaining times reading here. Thanks once more for all the details.
ReplyDeleteuipath training in bangalore
It is really amazing...thanks for sharing....provide more useful information...
ReplyDeleteEmbedded training in chennai | Embedded training centre in chennai | Embedded system training in chennai | PLC Training institute in chennai | IEEE final year projects in chennai | VLSI training institute in chennai
Do you have a spam issue on this website; I also am a blogger, and I wanted to know your situation; many of us have developed some nice methods, and we are looking to trade methods with others, why not shoot me an e-mail if interested.
ReplyDeleteDevOps Training in Chennai
very interesting. RPA training in Chennai
ReplyDeleteThanks for sharing this Informative content.
ReplyDeleteMicrocontroller Training in Noida
Thank you Admin!
ReplyDeleteReal time project center provides Final year projects in chennai
I am reading your post from the beginning, it was so interesting to read & I feel thanks to you for posting such a good blog, keep updates regularly.
ReplyDeleteRegards,
embedded systems and robotics training in chennai
I believe there are many more pleasurable opportunities ahead for individuals that looked at your site.
ReplyDeleteEmbedded Project Centers in Chennai | Ece Projects in Chennai
Very Nice!
ReplyDeleteThanks for sharing useful for final year students.you can refer best
Python Training in Chennai | Application Projects in Chennai.
Thanks for the information.It is very helpful for me like who are getting
ReplyDeletePhd Research Projects in Chennai | Embedded Projects in Chennai.
Great post.I am actually getting ready to across this information, its very helpful for this blog.Also great with all of the valuable information you have keep up the good work you are doing well.
ReplyDeleteAdvance Java Training in Chennai | Android Training in chennai.
Nice and good article. It is very useful for me to learn and understand easily.
ReplyDeleteIEEE NS3 Projects in Chennai | IEEE Electronics Projects in Chennai.
Thank you for this article.
ReplyDeleteFinal Year Vlsi Project Centres Chennai | Final Year Robotics Project Centres Chennai.
This comment has been removed by the author.
ReplyDeleteVery Informative blog. Thanks for sharing the information.
ReplyDeleteEmbedded Training in Chennai | Embedded Systems Training in Chennai
I undoubtedly appreciate you for making such a compelling article accessible among us. Got to learn a lot going through this article. Keep sharing.
ReplyDeleteWebsite Design Company in Lucknow | Website Redesign Services
Please send the code of transmission and receiver circuit at id11.gamer@gmail.com
ReplyDeleteGreat Article… I love to read your articles because your writing style is too good, its is very very helpful for all of us and I never get bored while reading your article because, they are becomes a more and more interesting from the starting lines until the end.
ReplyDeleteData science training in velachery
Data science training in kalyan nagar
Data Science training in OMR
Data Science training in anna nagar
Data Science training in chennai
Data Science training in marathahalli
Data Science training in BTM layout
Data Science training in rajaji nagar
I found your blog while searching for the updates, I am happy to be here. Very useful content and also easily understandable providing.. Believe me I did wrote an post about tutorials for beginners with reference of your blog.
ReplyDeleteDevops training in velachry
Devops training in OMR
Deops training in annanagar
Devops training in chennai
Devops training in marathahalli
Devops training in rajajinagar
Devops training in BTM Layout
This comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
Delete
ReplyDeleteI would like to thank you for your nicely written post, its informative and your writing style encouraged me to read it till end. Thanks
angularjs-Training in annanagar
angularjs Training in chennai
angularjs Training in chennai
angularjs Training in bangalore
Wow, Excellent post. This article is really very interesting and effective.you are posting a good information for people and keep maintain and give more update too.
ReplyDeletePython Training in Chennai
Python Training
We offer robotics training at our institute through our expertise faculties. Learning robotics will help you to hold a job position such as Specialist, technician, or robotics Engineer in the leading companies of the world.Call @9953489987.
ReplyDeleteGreat post.I am actually getting ready to across this information, its very helpful for this blog.Also great with all of the valuable information you have keep up the good work you are doing well.
ReplyDeletePower BI Training
Active Directory Training
RPA Training
Wow, Excellent post. This article is really very interesting and effective.you are posting a good information for people and keep maintain and give more update too.
ReplyDeleteWorkday Training From India
Mule Esb Training From India
Devops Training From India
I would like to thank you for your nicely written post, its informative and your writing style encouraged me to read it till end. Thanks
ReplyDeleteSCCM Selfplaced Videos
Office 365 Selfplaced Videos
Exchange Server Selfplaced Videos
Greetings. I know this is somewhat off-topic, but I was wondering if you knew where I could get a captcha plugin for my comment form? I’m using the same blog platform like yours, and I’m having difficulty finding one? Thanks a lot.
ReplyDeleteAmazon Web Services Training in Tambaram, Chennai|Best AWS Training in Tambaram, Chennai
Amazon Online Training
AWS Training in JayaNagar | Amazon Web Services Training in jayaNagar
AWS Training in Rajaji Nagar | Amazon Web Services Training in Rajaji Nagar
Amazon Web Services Training in Pune | Best AWS Training in Pune
AWS Online Training | Online AWS Certification Course - Gangboard
Thanks for splitting your comprehension with us. It’s really useful to me & I hope it helps the people who in need of this vital information.
ReplyDeletepython training in OMR
python training in tambaram
python training in annanagar
PCB Design Training in Bangalore offered by myTectra. India's No.1 PCB Design Training Institute. Classroom, Online and Corporate training in PCB Design
ReplyDeletepcb design training in bangalore
Nice..it is really awesome article... i can learn more about the course... embedded training in chennai
ReplyDeleteReally very nice blog information for this one and more technical skills are improve,i like that kind of post.
ReplyDeleteAppium Training From India
Selenium Training From India
Awesome..You have clearly explained …Its very useful for me to know about new things..Keep on blogging..
ReplyDeleteSAP MM Online Training
Sql&plsql Online Training
workday Online Training
SAP GTS Online Training
Great website and content of your website is really awesome.
ReplyDeleteSelenium Training in Chennai
selenium testing training in chennai
Best ios Training institute in Chennai
iOS Course Chennai
JAVA Training Institutes in Chennai
Java Courses in Chennai
I look forward to fresh updates and will talk about this blog with my Facebook group. Chat soon!
ReplyDeleteindustrial safetyu courses in chennai
Nice Blog...
ReplyDeleteThanks for Sharing...
AVR Training, Embedded Systems Training, Embedded Systems Training Institute in Noida
Nice post.. thank you for sharing.. embedded training training in chennai
ReplyDeleteThis blog is more effective and it is very much useful for me.
ReplyDeletewe need more information please keep update more.
Angularjs course in Bangalore
AngularJS Course in Anna Nagar
AngularJS Courses in T nagar
Positive site, where did u come up with the information on this posting?I have read a few of the articles on your website now, and I really like your style. Thanks a million and please keep up the effective work. R Programming Course Fees | R Language training in Chennai
ReplyDeleteAwesome Post. I was searching for such a information for a while. Thanks for Posting. Pls keep on writing.
ReplyDeleteInformatica Training institutes in Chennai
Best Informatica Training Institute In Chennai
Best Informatica Training center In Chennai
Informatica Training
Learn Informatica
Informatica course
Informatica MDM Training in Chennai
Thank you for benefiting from time to focus on this kind of, I feel firmly about it and also really like comprehending far more with this particular subject matter. In case doable, when you get know-how, is it possible to thoughts modernizing your site together with far more details? It’s extremely useful to me.
ReplyDeleteJava training in Bangalore | Java training in Marathahalli | Java training in Bangalore | Java training in Btm layout
Java training in Bangalore | Java training in Jaya nagar | Java training in Bangalore | Java training in Electronic city
Thank you for an additional great post. Exactly where else could anybody get that kind of facts in this kind of a ideal way of writing? I have a presentation next week, and I’m around the appear for this kind of data.
ReplyDeleteJava training in Bangalore | Java training in Marathahalli | Java training in Bangalore | Java training in Btm layout
Java training in Bangalore | Java training in Marathahalli | Java training in Bangalore | Java training in Btm layout
Thanks for splitting your comprehension with us. It’s really useful to me & I hope it helps the people who in need of this vital information.
ReplyDeleteJava training in Chennai | Java training in Annanagar | Java training in Chennai
Java training in Chennai | Java training in Bangalore | Java training in Electronic city
Awesome article. It is so detailed and well formatted that i enjoyed reading it as well as get some new information too.
ReplyDeleteJava training in Chennai | Java training in Annanagar | Java training in Chennai
Java training in Chennai | Java training in Bangalore | Java training in Electronic city
Thank you for sharing such great information with us. I really appreciate everything that you’ve done here and am glad to know that you really care about the world that we live in.
ReplyDeleteSoftware Testing Training in Chennai
Android Training in Chennai
Best Software Testing Training Institute in Chennai
Testing training
Best Android Training in Chennai
Android Course in Chennai with placement
Excellent and useful blog admin, I would like to read more about this topic
ReplyDeleteDevOps Training
DevOps course in Chennai
DevOps course
Best DevOps Training in Chennai
Data Analytics Courses in Chennai
Blue Prism Training Institutes in Chennai
RPA courses in Chennai
I’ve desired to post about something similar to this on one of my blogs and this has given me an idea. Cool Mat.
ReplyDeletepython training in chennai | python course institute in chennai | Data Science Interview questions and answers
I would assume that we use more than the eyes to gauge a person's feelings. Mouth. Body language. Even voice. You could at least have given us a face in this test.
ReplyDeletepython training in chennai | python course institute in chennai | Data Science Interview questions and answers
This comment has been removed by the author.
ReplyDelete
ReplyDeleteGreat efforts put it to find the list of articles which is very useful to know, Definitely will share the same to other forums. hadoop training in chennai velachery | hadoop training course fees in chennai | Hadoop Training in Chennai Omr
Wonderful bloggers like yourself who would positively reply encouraged me to be more open and engaging in commenting.So know it's helpful.
ReplyDeleteData Science course in kalyan nagar | Data Science Course in Bangalore | Data Science course in OMR | Data Science Course in Chennai
Data Science course in chennai | Best Data Science training in chennai | Data science course in velachery | Data Science course in Chennai
Data science course in jaya nagar | Data Science course in Bangalore | Data science training in tambaram | Data Science Course in Chennai
I have read your blog and I got some knowledgeable information through this blog. Really useful blog. Keep updating your blog.
ReplyDeleteOracle Training in Adyar
Best Oracle Training Institute in Velachery
Oracle Course in Tambaram
VMware Training in Adyar
VMware Training center in Velachery
VMware Course in Tambaram
He always kept chatting about this. I will forward this page to him. Fairly certain he will have a good read. Thank you for sharing.
ReplyDeleteindustrial safety courses in chennai
Write more; that’s all I have to say. It seems as though you relied on the video to make your point.
ReplyDeleteindustrial safety courses in chennai
When I initially commented, I clicked the “Notify me when new comments are added” checkbox and now each time a comment is added I get several emails with the same comment. Is there any way you can remove people from that service? Thanks.
ReplyDeleteAdvanced AWS Interview Questions And Answers
Advanced AWS Training in Chennai | Best AWS Training in Chennai
Advanced AWS Training in Pune | Best Amazon Web Services Training in Pune
This is really too useful and have more ideas and keep sharing many techniques. Eagerly waiting for your new blog keep doing more.
ReplyDeletecloud computing courses in bangalore
cloud computing training in bangalore
Angularjs Training Institute In Bangalore
Angularjs Course in Bangalore
cloud training in bangalore
cloud computing institutes in bangalore
This comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis information is impressive. I am inspired with your post writing style & how continuously you describe this topic. Eagerly waiting for your new blog keep doing more.
ReplyDeleteccna Course in Bangalor
ccna Training in Bangalore
Best ccna Institute in Bangalore
ccna Institute in Bangalore
cloud computing courses in bangalore
cloud computing training in bangalore
ReplyDeleteThe knowledge of technology you have been sharing thorough this post is very much helpful to develop new idea. here by i also want to share this.
angularjs Training in electronic-city
angularjs online Training
angularjs Training in marathahalli
angularjs interview questions and answers
angularjs Training in bangalore
ReplyDeleteThanks for sharining your post
Here is STUCORNER the Best Mobile application training institute in Laxmi Nagar you can visit their site:
Best Mobile application Training institute
Thanks for your contribution in sharing such a useful information. Waiting for your further updates.
ReplyDeleteIELTS Tambaram
IELTS Coaching in Chennai Tambaram
IELTS Classes near me
IELTS Velachery
IELTS Training in Chennai Velachery
IELTS Training in Velachery
IELTS Coaching Centre in Velachery
Awesome Post. It was a pleasure reading your article. Thanks for sharing.
ReplyDeletePega training in chennai
Pega course in chennai
Pega training institutes in chennai
Pega course
Pega training
Pega certification training
Pega developer training
Wonderful blog, share more like this.
ReplyDeletePython Training Institute in Chennai
Best Python Training in Chennai
Python Training in Velachery
Best Python Training Institutes in Chennai
Python Training courses
Python Training classes in Chennai
Nice Stuff!!!
ReplyDeleteJava Training in Chennai
Python Training in Chennai
IOT Training in Chennai
Selenium Training in Chennai
Data Science Training in Chennai
FSD Training in Chennai
MEAN Stack Training in Chennai
Good to see this blog admin, really helpful.
ReplyDeleteBlue Prism Training in Chennai
Blue Prism Training Institute in Chennai
Blue Prism course in Chennai
Blue prism course
RPA Training in Chennai
AWS Training in Chennai
Wonderful blog. Thanks for taking time to share this information with us.
ReplyDeleteccna Training in Chennai
ccna course in Chennai
ccna certification in Chennai
ccna courses in Chennai
ccna Training Chennai
ccna Training institutes in Chennai
Amazing Post. Great write-up. Extra-ordinary work. Waiting for your next Post.
ReplyDeleteSocial Media Marketing Courses in Chennai
Social Media Marketing Training in Chennai
Social Media Training in Chennai
Social Media Marketing Training
Social Media Marketing Courses
Social Media Training
Social Media Marketing Training
Social Media Courses
The information which you have shared is mind blowing to us. Thanks for your blog.
ReplyDeleteccna course in coimbatore
ccna training in coimbatore
ccna course in coimbatore with placement
best ccna training institute in coimbatore
ccna certification in coimbatore
Thank you for the blog. It was a really exhilarating for me.
ReplyDeleteselenium testing course in chennai
selenium course
iOS Training in Chennai
French Classes in Chennai
web designing training in chennai
Big Data Training in Chennai
Hadoop Course in Chennai
best big data training in chennai
Thanks for sharing this useful information. Keep doing regularly.
ReplyDeleteIELTS Classes in Chennai
Best IELTS Courses in Chennai
IELTS in Chennai
Best IELTS Class in Chennai
IELTS Training Institute in Chennai
IELTS Coaching Classes in Chennai
Best IELTS Institute in Chennai
Thanks for sharing these effective tips. It was very helpful for me.
ReplyDeleteBouncers in chennai
| security service company in chennai | Part time bouncers service in chennai
It is amazing and wonderful to visit your site.Thanks for sharing this information,this is useful to me...
ReplyDeletecatalogue printing in Chennai | business cards printing press in chennai
Nice post..keep sharing..
ReplyDeleteThanks for sharing this blog post,Nice
ReplyDeleteBest water level controller in Chennai | best automatic water level controller in chennai
Learned a lot of new things from this article.....
ReplyDeleteCompany accounts practice in chennai |
Spoken english training in chennai |
GST training in chennai